从弹簧摆到双摆,《张朝阳的物理课》展示拉格朗日力学的优越之处
拉格朗日力学的案例分析
在之前的课程中,张朝阳已经介绍了拉格朗日力学,包括变分原理等。但是我们遇到的很多力学问题使用牛顿力学都可以很好的处理,那么什么情况下使用拉格朗日力学会更加方便呢?《张朝阳的物理课》第一百八十期开播,搜狐创始人、董事局主席兼首席执行官、物理学博士张朝阳坐镇搜狐视频直播间,对这一问题进行了研究和讲解。通过弹簧摆与双摆两个案例来说明拉格朗日力学在实际应用中的优越之处。
拉格朗日力学
张朝阳首先回顾了之前课程讲解的拉格朗日力学的内容。
首先,任给一个想要研究的物体,要描述它需要时间t,广义坐标q以及广义坐标对时间的导数(广义速度)。在通常的机械运动情况下,考虑不含时的系统,它的拉氏量就有如下形式:
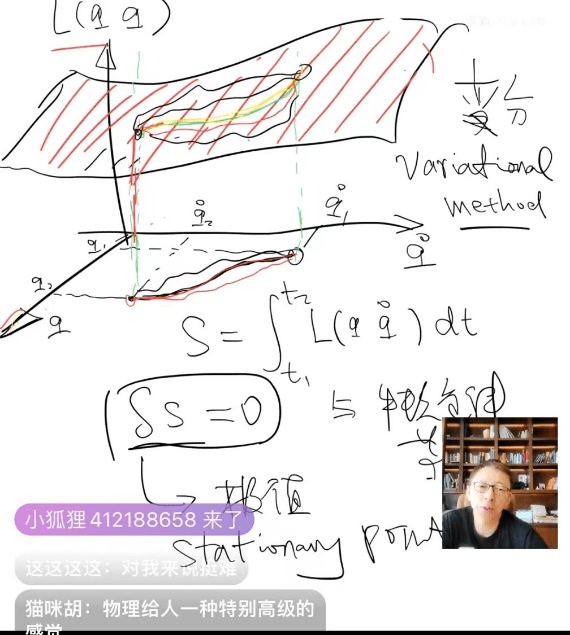
拉氏量是广义坐标与它们对时间的导数的函数。真实情况下物体总是沿着某一条路径运动,当在地球上低速情况下,决定粒子路径的规律正是牛顿力学。不妨假设物体运动在一维空间中,在t1时刻的广义坐标为q1,t2时刻为q2,并且对于这两个路径的端点,广义速度也是确定的。这里,张朝阳希望展示一种更直观的方案来理解变分原理。以粒子的广义坐标与广义速度为坐标轴,物体路径上每一点都有一个相应的拉氏量的取值。现在,先假设广义坐标与广义速度间是独立的,对物体运动的路径来做一些微小的变动, 希望能够通过这样的变动来找到真实的路径(被牛顿力学决定的)有什么特殊之处,也即,所有可能的路径中真实路径应该满足什么样的条件才能回到牛顿力学的要求。首先,所有允许的路径都应该满足广义速度是广义坐标对时间的导数,不仅如此,还要满足下式的积分约束条件:
几何上,所有满足上边两个条件的路径是广义坐标、广义速度以及拉氏量三者张成的空间中某个超曲面的子集。现在固定路径的起点与终点,让路径在这一集合中变化,这一步骤被称作变分。结论就是,作用量(即拉氏量沿路径的积分)在变分的操作下取极值,如下式所示:
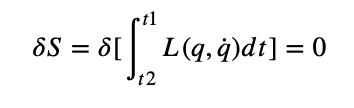
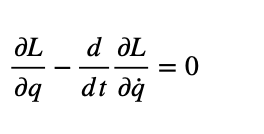
相应的拉氏量满足的微分方程(Euler-Lagrange方程)为:
 张朝阳讲解变分原理
张朝阳讲解变分原理
弹簧摆
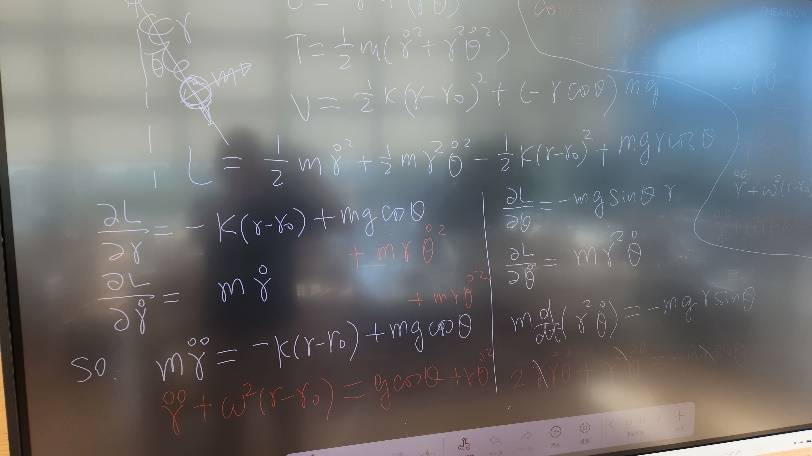
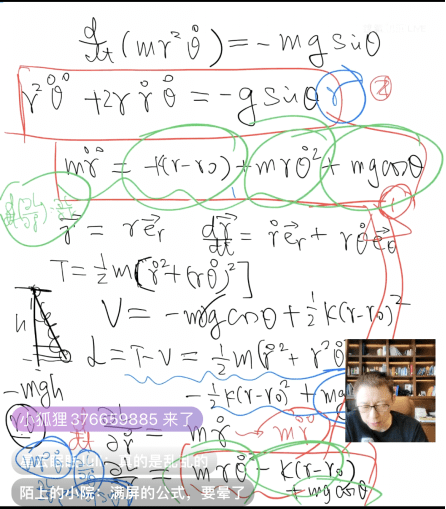
之前张朝阳已经举过一些例子来讲解拉格朗日力学,包括自由落体、中心力场等。今天继续研究更多的案例,首先是弹簧摆(spring pendulum),即一个弹簧下悬挂一个小球,小球会沿着弹簧方向振动的同时随弹簧一起摆动。弹簧的劲度系数为k,小球的质量为m,重力加速度为g,弹簧摆动的角度为theta,弹簧自然长度为r0,小球距离弹簧顶端悬挂点的距离为r(即弹簧实际长度)。首先使用牛顿力学来对这一系统进行受力分析。对于径向(沿着弹簧的方向),小球受到弹簧的弹力、重力的分力以及在弹簧系下的惯性力(离心力),写出牛顿第二定律为:

对于角向,小球只受到重力的分力,由角动量定理可以得到:

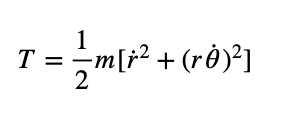
回到拉格朗日力学再来研究弹簧摆,就要分别写出系统的动能以及势能。动能为:
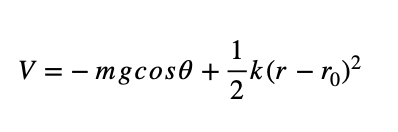
势能为:
拉氏量为:

因此,由Euler-Lagrange方程就可以直接写出径向的运动方程:

以及角向的运动方程:
可以看到和用牛顿力学分析得到的方程完全一致。对于弹簧摆,由于径向的运动和角向的运动是耦合的,方程无法解析求解,张朝阳课上展示了数值计算得到的图象化结果,可以看到出现了混沌现象,这一系统是对初值敏感的。
 张朝阳分析弹簧摆的运动方程
张朝阳分析弹簧摆的运动方程
双摆
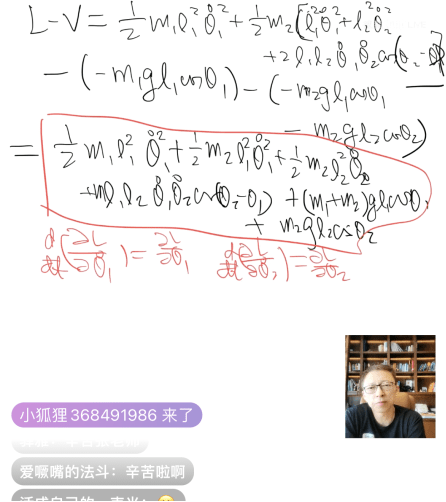
双摆(double pendulum)是一个典型的使用牛顿力学分析比较困难的系统,但是使用拉格朗日力学会相对容易许多。双摆由两个小球,m1由轻杆l1悬挂在固定点,m2由轻杆l2悬挂在小球m1上,两球摆动的角度分别为theta1和theta2。系统的动能项由两个小球的动能相加得到:

系统势能同理:

则拉氏量为:

同样使用Euler-Lagrange方程,就能够得到双摆的运动方程。
 张朝阳分析双摆的拉氏量
张朝阳分析双摆的拉氏量
张朝阳分析双摆的拉氏量据了解,《张朝阳的物理课》于每周五、周日中午12时在搜狐视频直播,网友可以在搜狐视频APP“关注流”中搜索“张朝阳”,观看直播及往期完整视频回放;关注“张朝阳的物理课”账号,查看课程中的“知识点”短视频;此外,还可以在搜狐新闻APP的“搜狐科技”账号上,阅览每期物理课程的详细文章。